460.01 Definition
460.011
The “jitterbug” is the finitely closed, external vector structuring of a vector- equilibrium model constructed with 24 struts, each representing the push-pull, action-and- reaction, local compression vectors, all of them cohered tensionally to one another’s ends by flexible joints that carry only tension across themselves, so that the whole system of only-locally-effective compression vectors is comprehensively cohered by omniembracing continuous four closed hexagonal cycles’ tension.
460.02
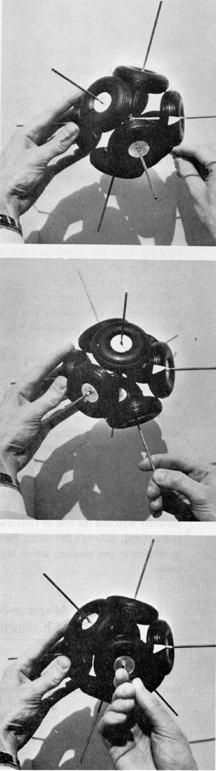
When the vector-equilibrium “jitterbug” assembly of eight triangles and six squares is opened, it may be hand-held in the omnisymmetry conformation of the vector equilibrium “idealized nothingness of absolute middleness.” If one of the vector equilibrium’s triangles is held by both hands in the following manner—with that triangle horizontal and parallel to and above a tabletop; with one of its apexes pointed away from the holder and the balance of the jitterbug system dangling symmetrically; with the opposite and lowest triangle, opposite to the one held, just parallel to and contacting the tabletop, with one of its apexes pointed toward the individual who is handholding the jitterbug—and then the top triangle is deliberately lowered toward the triangle resting on the table without allowing either the triangle on the table or the triangle in the operator’s hands to rotate (keeping hands clear of the rest of the system), the whole vector equilibrium array will be seen to be both rotating equatorially, parallel to the table but not rotating its polar-axis triangles, the top one of which the operating individual is hand- lowering, while carefully avoiding any horizontal rotation of, the top triangle in respect to which its opposite triangle, resting frictionally on the table, is also neither rotating horizontally nor moving in any direction at all.
460.03
While the equatorial rotating results from the top triangle’s rotationless lowering, it will also be seen that the whole vector-equilibrium array is contracting symmetrically, that is, all of its 12 symmetrically radiated vertexes move synchronously and symmetrically toward the common volumetric center of the spherically chorded vector equilibrium. As it contracts comprehensively and always symmetrically, it goes through a series of geometricaltransformation stages. It becomes first an icosahedron and then an octahedron, with all of its vertexes approaching one another symmetrically and without twisting its axis.
460.04
At the octahedron stage of omnisymmetrical contraction, all the vectors (strut edges) are doubled together in tight parallel, with the vector equilibrium’s 24 struts now producing two 12-strut-edged octahedra congruent with one another. If the top triangle of the composite octahedron (which is the triangle hand-held from the start, which had never been rotated, but only lowered with each of its three vertexes approaching exactly perpendicularly toward the table) is now rotated 60 degrees and lowered further, the whole structural system will transform swiftly into a tetrahedron with its original 24 edges now quadrupled together in the six-edge pattern of the tetrahedron, with four tetrahedra now congruent with one another. Organic chemists would describe it as a quadrivalent tetrahedral structure.
460.05
Finally, the model of the tetrahedron turns itself inside out and oscillates between inside and outside phases. It does this as three of its four triangular faces hinge open around its base triangle like a flower bud’s petals opening and hinging beyond the horizontal plane closing the tetrahedron bud below the base triangle.
460.06
As the tetrahedron is opened again to the horizontal four-triangle condition, the central top triangle may again be lifted, and the whole contractive sequence of events from vector equilibrium to tetrahedron is reversed; the system expands after attaining the octahedral stage. When lifting of the topheld, nonhorizontally rotated triangle has resulted in the whole system expanding to the vector equilibrium, the equatorial rotational momentum will be seen to carry the rotation beyond dead-center, and the system starts to contract itself again. If the operating individual accommodates this momentum trend and again lowers the top triangle without rotating it horizontally, the rotation will reverse its original direction and the system will contract through its previous stages but with a new mix of doubled-up struts. As the lowering and raising of the top triangle is continuously in synchronization with the rotatingcontracting-expanding, the rotation changes at the vector equilibrium’s “zero”— this occasions the name jitterbug. The vector equilibrium has four axial pairs of its eight triangular faces, and at each pair, there are different mixes of the same struts.
460.07
The jitterbug employs only the external vectors of the vector equilibrium and not its 12 internal radii. They were removed as a consequence of observing the structural stability of 12 spheres closest packed around a nuclear sphere. When the nuclear sphere is removed or mildly contracted, the 12 balls rearrange themselves (always retaining their symmetry) in the form of the icosahedron. Removal of the radial vectors permitted contraction of the model—and its own omnisymmetrical pulsation when the lowering and raising patterns are swiftly repeated. It will be seen that the squares accommodate the jitterbug contractions by transforming first into two equiangular triangles and then disappearing altogether. The triangles do not change through the transformation in size or angularity. The original eight triangles of the vector equilibrium are those of the octahedron stage, and they double together to form the four faces of the tetrahedron.
460.08
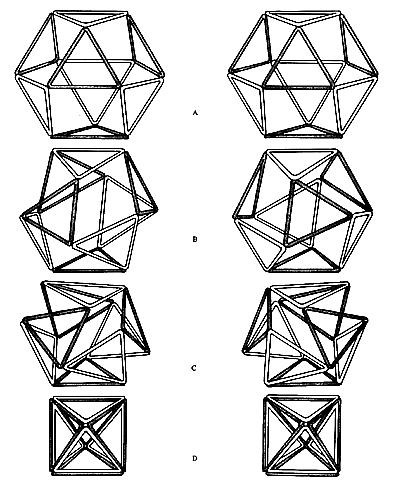
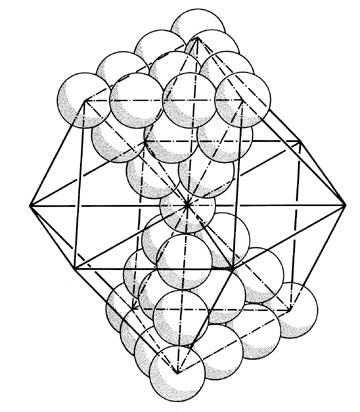
Fig. 460.08 Symmetrical Contraction of Vector Equilibrium
Fig. 460.08 Symmetrical Contraction of Vector Equilibrium: Jitterbug System: If the vector equilibrium is constructed with circumferential vectors only and joined with flexible connections, it will contract symmetrically due to the instability of the square faces. This contraction is identical to the contraction of the concentric sphere packing when its nuclear sphere is removed. This system of transformation has been referred to as the “jitterbug.” Its various phases are shown in both left- and right-hand contraction:
Link to original
A. Vector equilibrium phase: the beginning of the transformation.
B. Icosahedron phase: When the short diagonal dimension of the quadrilateral face is equal to the vector equilibrium edge length, 20 equilateral triangular faces are formed.
C. Further contraction toward the octahedron phase.
D. Octahedron phase: Note the doubling of the edges.
In the jitterbug, we have a sizeless, nuclear, omnidirectionally pulsing model. The vector-equilibrium jitterbug is a conceptual system independent of size, ergo cosmically generalizable. (See Secs. 515.10 and 515.11.)
461.00 Recapitulation: Polyhedral Progression in Jitterbug
461.01
If the vector equilibrium is constructed with circumferential vectors only and joined with flexible connectors, it will contract symmetrically, due to the instability of the square faces. This contraction is identical to the contraction of the concentric sphere packing when the nuclear sphere is removed. The squares behave as any four balls will do in a plane. They would like to rest and become a diamond, to get into two triangles. They took up more room as a square, and closer packing calls for a diamond. The 12 vertexes of the vector equilibrium simply rotate and compact a little. The center ball was keeping them from closer packing, so there is a little more compactibility when the center ball goes out.
461.02
Icosahedron: The icosahedron occurs when the square faces are no longer squares but have become diamonds. The diagonal of the square is considerably longer than its edges. But as we rotate the ridge pole, the diamonds become the same length as the edge of the square (or, the same length as the edge of the tetrahedron or the edge of the octahedron). It becomes the octahedron when all 30 edges are the same length. There are no more squares. We have a condition of omnitriangulation.
461.03
We discover that an icosahedron is the first degree of contraction of the vector equilibrium. We never catch the vector equilibrium in its true existence in reality: it is always going one way or the other. When we go to the icosahedron, we get to great realities. In the icosahedron, we get to a very prominent fiveness: around every vertex you can always count five.
461.04
The icosahedron contracts to a radius less than the radii of the vector equilibrium from which it derived. There is a sphere that is tangent to the other 12 spheres at the center of an icosahedron, but that sphere is inherently smaller. Its radius is less than the spheres in tangency which generate the 12 vertexes of the vector equilibrium or icosahedron. Since it is no longer the same-size sphere, it is not in the same frequency or in the same energetic dimensioning. The two structures are so intimate, but they do not have the same amount of energy. For instance, in relation to the tetrahedron as unity, the volume of the icosahedron is 18.51 in respect to the vector equilibrium’s volume of 20. The ratio is tantalizing because the mass of the electron in respect to the mass of the neutron is one over 18.51. That there should be such an important kind of seemingly irrational number provides a strong contrast to all the other rational data of the tetrahedron as unity, the octahedron as four, the vector equilibrium as 20, and the rhombic dodecahedron as six: beautiful whole rational numbers.
461.05
The icosahedron goes out of rational tunability due to its radius being too little to permit it having the same-size nuclear sphere, therefore putting it in a different frequency system. So when we get into atoms, we are dealing in each atom having its unique frequencies.
461.06
In the symmetrical jitterbug contraction, the top triangle does not rotate. Its vertex always points toward the mid-edge of the opposite triangle directly below it. As the sequence progresses, the top triangle approaches the lower as a result of the system’s contraction. The equator of the system twists and transforms, while the opposite triangles always approach each other rotationlessly. They are the polar group.
461.07
Octahedron: When the jitterbug progresses to the point where the vector edges have doubled up, we arrive at the octahedron. At this stage, the top triangle can be pumped up and down with the equatorial vectors being rotated first one way and then the other. There is a momentum of spin that throws a twist into the system—positive and negative. The right-hand octahedron and the left-hand octahedron are not the same: if we were to color the vectors to identify them, you would see that there are really two different octahedra.
461.08
Fig. 461.08 Jitterbug System Collapses into Tetrahedron
Fig. 461.08 Jitterbug System Collapses into Tetrahedron: Polarization: The “jitterbug” system, after reaching the octahedron phase, may be collapsed and folded into the regular tetrahedron. Notice that because the vector equilibrium has 24 edges the tetrahedra have accumulated four edges at each of their six normal edges. The “jitterbug” can also be folded into a larger but incomplete tetrahedron. Note that in this case the two sets of double edges suggest polarization.
Link to original
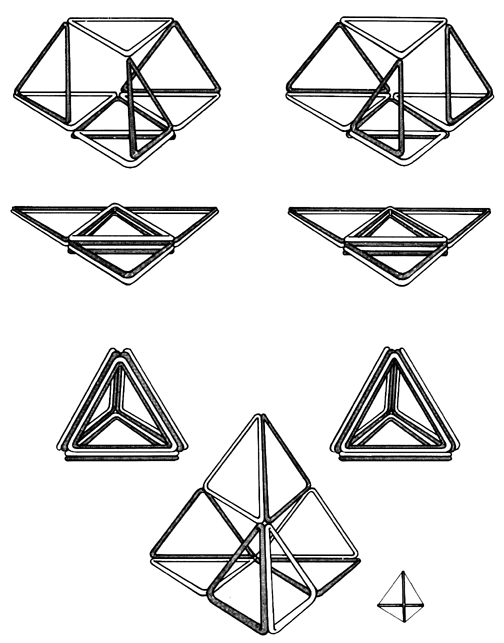
Tetrahedron: As the top triangle still plunges toward the opposite triangle, the two corners, by inertia, simply fold up. It has become the tetrahedron. In the octahedron stage, the vectors were doubled up, but now they have all become fourfold, or quadrivalent. The eight tetrahedra of the original vector equilibrium are now all composited as one. They could not escape from each other. We started off with one energy action in the system, but we have gone from a volume of 20 to a volume of one⁷. The finite closure of the four-great-circle, six-hexagon-vector “necklaces” were never “opened” or unfastened.
(Footnote 7: In vectorial geometry, you have to watch for the times when things double up. The vectors represent a mass and a velocity. Sometimes they double up so they represent twice the value—when they become congruent.)
461.09
We have arrived at the tetrahedron as a straight precessional result. The quadrivalent tetrahedron is the limit case of contraction that unfolds and expands again symmetrically only to contract once more to become the other tetrahedron (like the pumping of the positive and negative octahedron). All of the jitterbug sequence was accomplished within the original domain of the vector equilibrium. The tensional integrity survives within the internal affairs domain of atoms.
461.10
Deceptiveness of Topology: Quanta Loss By Congruence: (See poster, color plate 4.) The vector equilibrium jitterbug provides the articulative model for demonstrating the always omnisymmetrical, divergently expanding or convergently contracting intertransformability of the entire primitive polyhedral hierarchy, structuring- as-you-go, in an omnitriangularly oriented evolution.
461.11
As we explore the interbonding (valencing) of the evolving structural components, we soon discover that the universal interjoining of systems—and their foldabilitypermit their angularly hinged convergence into congruence of vertexes(single- bonding), or congruence of vectors (doublebonding), or congruence of faces (triple- bonding), or volumetric congruence (quadrivalent), but each of the multicongruences appears as only one vertex or one edge or one face aspect. The Eulerean topological accounting as presently practiced— innocent of the inherent synergetical hierarchy of intertransformability— accounts each of these multicongruent topological aspects as consisting of only one such aspect. This misaccounting has prevented the physicists and chemists from conceptual identification of their data with synergetics’ disclosure of nature’s comprehensively rational intercoordinate mathematical system.
461.12
Only the topological analysis of synergetics can account for all the multicongruent— two-, three-, fourfold— topological aspects by accounting for the initial tetravolume inventories of the comprehensive rhombic dodecahedron and the vector equilibrium. The rhombic dodecahedron has an initial tetravolume of 48, and the vector equilibrium has an inherent tetravolume of 20. Their respective initial or primitive inventories of vertexes, vectors, and faces are always present (though often imperceptibly so) at all stages in nature’s comprehensive 48 → 1 convergence transformation.
461.13
Although superficially the tetrahedron seems to have only six vectors, we witness in the jitterbug transformation that it has in fact 24. (See poster 4 and Fig. 461.08) The sizeless, primitive tetrahedron—conceptual independent of size—is quadrivalent, inherently having eight potential alternate ways of turning itself inside out: four passive and four active, meaning that four positive and four negative tetrahedra are congruent.
461.14
Only by recognizing the deceptiveness of Eulerean topology can synergetics account for the primitive total inventories of all aspects and thus conceptually demonstrate and prove the validity of Boltzmann’s concepts as well as those of all quantum phenomena. Synergetics mathematical accounting conceptually interlinks the operational data of physics and chemistry and their complex associabilities manifest in such disciplines as geology, biology, and others.
462.00 Rotation of Triangle in Cube
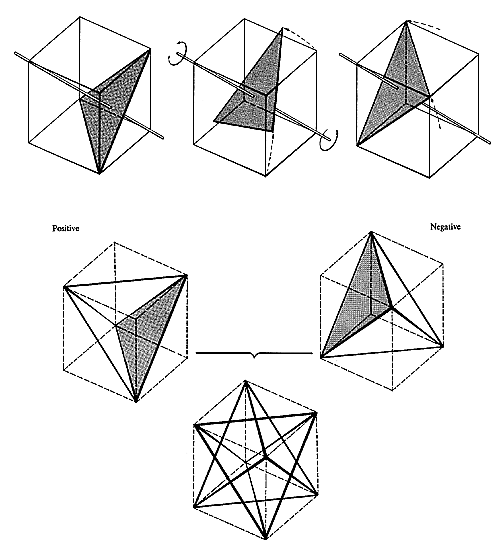
Fig. 462.00 The triangle formed by connecting diagonals of three adjacent faces of the cube is the face of the tetrahedron within the cube
Fig. 462.00 The triangle formed by connecting diagonals of three adjacent faces of the cube is the face of the tetrahedron within the cube. If the triangle is rotated so that its vertexes move along the edges of the cube, its position changes from the positive to the negative tetrahedron. Two equal tetrahedra (positive and negative) joined at their common centers define the cube. The total available energy of a system is related to its surface area, involving the second power (square) of the radius. E=Mc2: The conjunction of any two similar systems results in a synergetic relationship: the second power of individual totals of cohesiveness of the systems.
Link to original
462.01
To comprehend the complex of transformings demonstrated by the jitterbug we may identify each of the eight triangles of the vector equilibrium with the eight small cubes which comprise a two-frequency large cube’s eight corners. When the jitterbug transforms into an octahedron, the jitterbug vector equilibrium’s six square faces disappear leaving only the eight triangles of the vector equilibrium, each of which has moved inwardly at a symmetrical rate toward the common center of the vector equilibrium as the squares disappear and the triangles approach one another until their respective three edges each become congruent with one another, thus doubling their vector edges together in paralleled congruence. Since each of the eight triangles behaved the same way as the others we can now study how one behaved and we find that each triangle “did its thing” entirely within the domain of one of the eight cubes of the two-frequency big cube. Thus we learn that a triangle can rotate within the topological lines of a cube with the triangle’s three corners being guided by the cube’s edges.
462.02
Wave-propagating action is cyclically generated by a cube with a triangle rotating in it.
463.00 Diagonal of Cube as Wave-Propagation Model
463.01
Fig. 463.01 There are no straight lines, only waves resembling them
Fig. 463.01 There are no straight lines, only waves resembling them. In this diagram, any zigzag path from A to C equals the sum of the sides AB and BC. If zigzag is infinitely small, it looks like a diagonal that should be shorter than ABC. It is not.
Link to original
There are no straight lines, only waves resembling them. In the diagram, any zigzag path from A to C equals the sum of the sides AB and BC. If the zigzag is of high frequency, it may look like a diagonal that should be shorter than ABC. It is not.
463.02
As the triangle rotates in the cube, it goes from being congruent with the positive tetrahedron to being congruent with the negative tetrahedron. It is an oscillating system in which, as the triangles rotate, their corners describe arcs (see Sec. 464.02) which convert the cube’s 12 edges from quasistraight lines to 12 arcs which altogether produce a dynamically described sphere (a spherical cube) which makes each cube to appear to be swelling locally. But there is a pulsation arc-motion lag in it exactly like our dropping a stone in the water and getting a planar pattern for a wave (see Sec. 505.30), but in this model we get an omnidirectional wave pulsation. This is the first time man has been able to have a conceptual picture of a local electromagnetic wave disturbance.
463.03
The cube oscillates from the static condition to the dynamic, from the potential to the radiant. As it becomes a wave, the linear becomes the second-power rate of grc wth. The sum of the squares of the two legs = the square of the hypotenuse=the wave. The 12 edges of the cube become the six diagonals of the tetrahedron by virtue of the hypotenuse: the tetrahedron is the normal condition of the real (electromagnetic) world. (See Sec. 982.21.)
463.04
There is an extraordinary synergetic realization as a consequence of correlating (a) the arc-describing, edge-pulsing of cubes generated by the eight triangles rotating in the spheres whose arcs describe the spherical cube (which is a sphere whose volume is 2.714—approximately three—times that of the cube) and (b) the deliberately nonstraight line transformation model (see Sec. 522), in which the edges of the cube become the six wavilinear diagonals of the cube, which means the cube transforming into a tetrahedron. Synergetically, we have the tetrahedron of volume one and the cube of volume three—as considered separately—in no way predicting that the cube would be transformed into an electromagnetic-wave-propagating tetrahedron. This is an energy compacting of 3 → 1; but sum-totally this means an energetic-volumetric contraction from the spherical cube’s volume of 8.142 to the tetrahedron’s one, which energetic compacting serves re-exp—nsively to power the electromagnetic-wave-propagating behavior of the wavilinearedged tetrahedron. (See Sec. 982.30.)
463.05
We really find, learning synergetically, from the combined behaviors of the tetrahedron, the cube, and the deliberately-nonstraight-line cubical transformation into a tetrahedron, how the eight cubical corners are self-truncated to produce the vector equilibrium within the allspace-filling cubical isotropic-vector-matrix reference frame; in so doing, the local vacatings of the myriad complex of closest-packing cube truncations produce a “fallout” of all the “exterior octahedra” as a consequence of the simultaneous truncation of the eight comers of the eight cubes surrounding any one point. As we learn elsewhere (see Sec. 1032.10), the exterior octahedron is the contracted vector equilibriurn and is one of the spaces between spheres; the octahedron thus becomes available as the potential alternate new sphere when the old spheres become spaces. The octahedra thus serve in the allspace-filling exchange of spheres and spaces (see Sec. 970.20).
464.00 Triangle in Cube as Energetic Model
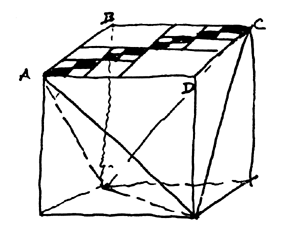
Fig. 464.01 Triangle in Cube as Energetic Model
Fig. 464.01 Triangle in Cube as Energetic Model: The rotating shaft is labeled AB. The model demonstrates that there are six vector moves per cycle.
Link to original
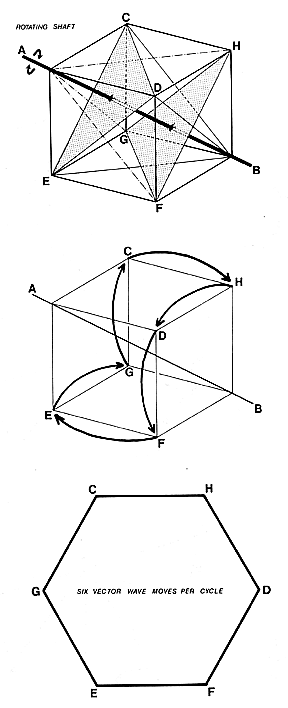
464.01
The triangle CDE formed by connecting the diagonals of the three adjacent square faces surrounding one corner, A, of the cube defines the base triangular face of one of the two tetrahedra always coexisting within, and structurally permitting the stability of, the otherwise unstable cubic form. The triangle GHF formed by connecting the three adjacent faces surrounding the B corner of the same cube diametrically, i.e. polarly, opposite the first triangulated corner, defines the triangular face GHF of the other of the two tetrahedra always coexisting within that and all other cubes. The plane of the green triangle CDE remains always parallel to the plane of the red triangle GHF even though it is rotated along and around the shaft AB (see drawings section).
464.02
If the first triangle CDE defined by the three diagonals surrounding the A corner of the cube is rotated on the axis forrned by the diagonal leading from that corner of the cube inwardly to its polarly opposite and oppositely triangled B corner, the rotated triangle maintains its attitude at right angles to its axis, and its three vertexes move along the three edges of the cube until the green triangle reaches and become congruent with the red base triangle of the axially opposite corner. Thereafter, if the rotation continues in the same circular direction, the same traveling triangle will continue to travel pulsatingly, back and forth, becoming alternately the base triangle of the positive and then of the negative tetrahedron. As the triangle returns from its first trip away, its corners follow three additional edges of the cube. As the vertexes of the shuttling triangle follow the six cube edges, their apexes protrude and describe spherical arcs outwardly along the cubes’ edges running from cube corner to cube corner. Swift rotation of the triangle’s shaft not only causes the triangle to shuttle back and forth, but also to describe six of the 12 edges of the spherical cube producing an equatorially spheroid pulsation. The two equal tetrahedra are not only oppositely oriented, but their respective volumetric centers (positive and negative) are congruent, being joined at their common centers of volume, which coincide with that of the containing cube. Because each cube in the eight-cube, two-frequency big cube has both a positive and a negative tetrahedron in it, and because each tetrahedron has four triangular faces, each cube has eight equilateral triangular edges corresponding to the 12 diagonalling hypotenuses of each cube’s six faces.
464.03
Each cube has four pairs of polarly opposite corners. There are four co- occurring, synchronously operative, triangularly shuttleable systems within each cube; with all of them synchronously operative, the cube’s 12 edges will be synchronously accommodating— 4 × 6 = 24 — edge-arcings traveling 12 positively and 12 negatively, to produce the profile of two spherical cubes, one positive and one negative.
464.04
Each vector equilibrium, when complemented by its coexistent share of one- eighth of its (concave) external octahedra, embraces eight cubes, each of which has four activable, axially shuttleable, electromagnetic-energygenerating potentials.
464.05
Eight of these triangular shuttle cubes may be completed on each of the vector equilibrium’s eight triangular faces by adding one 1/8th-Octa comer to each of them. Each 1/8th-Octa corner consists of six A and six B modules. As one such l/8th-Octa, 6A-6B moduled, 90°-apexed, equianglebased, isosceles tetrahedron is added to any of the vector equilibrium’s eight triangular faces, which contain the potential new nucleus— which thus becomes a newborn active nucleus—when so double-layer covered by the 12 A’s and 12 B’s energy modules, which altogether produce a total of 24 energy modules whenever the rotating triangle alternates its position, which combined 24 modules correspond to the 24 energy modules of one whole regular tetrahedral event, which is the quantum in nuclear physics.
464.06
The vector equilibrium’s jitterbugging conceptually manifests that any action (and its inherent reaction force) applied to any system always articulates a complex of vector-equilibria, macro-micro jitterbugging, invllving all the vector equilibria’s ever cosmically replete complenentations by their always co-occurring internal and external octahedra—all of which respond to the action by intertransforming in concert from “space nothingnesses” into closest-packed spherical “somethings,” and vice versa, in a complex threeway shuttle while propagating a total omniradiant wave pulsation operating in unique frequencies that in no-wise interfere with the always omni-co-occurring cosmic gamut of otherly frequenced cosmic vector-equilibria accommodations.
464.07
In contradistinction to the sphere, the tetrahedron has the most surface with the least volume of any symmetrical form. The total available energy of a system is related to its surface area, involving the second power of the radius. E = Mc². The mass congruence of any two similar systems results in a synergetic relationship with a second- powering of cohesiveness of the joined systems. This releases the fourfolded energy, which no longer has the two tetrahedra’s mass-interattraction work to do, and this in turn releases the energies outward to the tetrahedra’s highest-capacity surfaces. And since surface functions as the electromagnetic-energy carrier, and since the energy relayed to their surfaces alternates from the positive to the negative tetrahedron, and since the distance between their surface centers is only two A Module altitude wavelengths (each of which two A Module altitudes constitute and serve as one generalized electromagnetic wavelength with generatable frequency beginning at two), the rotation of the triangle within the cube passes through the common energy centers of the two tetrahedra and delivers its content to the other base surface, after which it pulses through center delivery of the opposite charge to the other surface, which altogether propagates potentially exportable, frequency-determinate, electromagnetic energy. The six cube-edge travelings of the triangles’ vertexes accomplished with each cycle of the triangle-in-cube shuttle coincides in number and is akin to the six vector edges comprising one tetrahedral quantum; the sixness of wavilinear and sometimes reangularly redirected traveling employs also the six basic degrees of freedom articulated by each and every one cosmic event.
464.08
Thus we realize conceptually the ever-self-regenerative, omniidealized, eternal integrity of the utterly metaphysical, timeless, weightless, zerophase geometric frame of transformations referencing function, which is served by the vector equilibrium in respect to which all the aberrational dimensioning of all realization of the variety of relative durations, sensorial lags, recalls, and imaginings are formulatingly referenced to differentiate out into the special-case local experiences of the eternal scenario Universe, which each of us identifies to ourselves as the “Shape of Things” and which each individual sees differently yet ever intuits to be rigorously referenced to an invisibly perfect prototype in pure principle, in respect to which only approachable but never realizable “understanding” of one of us by others occurs: “And it Came to Pass.”
465.00 Rotation of Four Axes of Vector Equilibrium: Triangles, Wheels, and Cams
Fig. 465.00 Note that the eight triangular faces of the vector equilibrium are disposed about four-sided openings, i.e. square faces
Fig. 465.00 Note that the eight triangular faces of the vector equilibrium are disposed about four-sided openings, i.e. square faces. It is possible to arrange 20 triangles in similar fashion around five-sided openings, i.e. pentagons. The shape is the icosadodecahedron. When a model is constructed with 20 spokes, i.e. ten axes, meeting at its center, which pass through the centers of each triangle, an unexpected behavior results. In the vector equilibrium model the triangles will rotate and contract towards tits center, however, with the icosadodecahedron the entire structure remains fixed. It is not capable of contraction due to the fact that there is an odd number of triangles surrounding each opening. The diagrams show clearly why this is so. Any odd-numbered array of interlocked gears will not be free to rotate.
Link to original
465.01
Fig. 465.01 Four Axes of Vector Equilibrium with Rotating Wheels or Triangular Cams
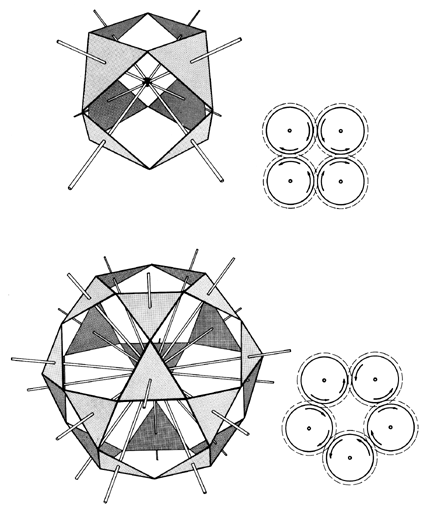
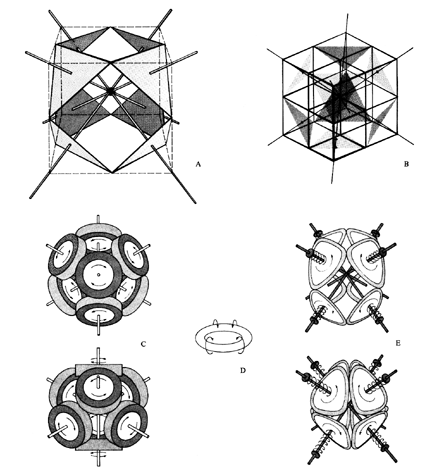
Fig. 465.01 Four Axes of Vector Equilibrium with Rotating Wheels or Triangular Cams:
Link to original
A. The four axes of the vector equilibrium suggesting a four-dimensional system. In the contraction of the “jitterbug” from vector equilibrium to the octahedron, the triangles rotate about these axes.
B. Each triangle rotates in its own cube.
C. The four axes of the vector equilibrium shown with wheels replacing the triangular faces. The wheels are tangent to one another at the vertexes of the triangles, and when one wheel is turned, the others also rotate. If one wheel is immobilized and the system is rotated on the axes of this wheel, the opposite wheel remains stationary, demonstrating the polarity of the system.
D. Each wheel can be visualized as rotating inwardly on itself thereby causing all other wheels to rotate in a similar fashion.
E. If each wheel is conceived as a triangular cam shape, when they are rotated a continuous “pumping” or reciprocating action is introduced.
We can have a vector equilibrium model made out of a tubular steel frame with each of the eight triangular faces connected by four axes with a journal to slide on the shafts and with each of the rods being perpendicular to two of the eight triangular faces. This is a four-dimensional, four-axis system. Just as a regular tetrahedron has four unique faces, so there are four unique perpendiculars to them, making a four-dimensional system.
465.02
We can put a little rivet through the centers of area of the eight triangles, and we can let the brass rod run through the journals and slide on a wire. We can tie the corners of the triangles together with nylon threads. If we spin the model rapidly on one of the axes, all the triangles slide outwardly to form the vector equilibrium. If next we touch a finger or a pencil to any midface of one triangle in the spinning system, the whole system will contract symmelrically until it becomes an octahedron. But when we take the finger or pencil off again, centrifugal force will automatically open up the system to the vector- equilibrium condition again. The oscillating motion makes this an expanding and contracting system.
465.03
Fig. 465.03 Rotation of Four Axes of Vector Equilibrium
Fig. 465.03 Rotation of Four Axes of Vector Equilibrium: Articulation of Eight Triangular Faces.
Link to original
We see that every one of the triangles in the vector equilibrium can shuttle back and forth, so that all the edges of the cube would be arced outwardly with pairs of arcing triangle corners shuttling in opposite directions by each other. With a swiftly oscillating system and a pulsating spherical expansion-contraction going on everywhere locally, the whole system becomes an optically pulsating sphere. We find that each one of the little triangles rotates as if it were swelling locally. Each one of their vertexes brings about a further spherical condition, so that in the whole system, all the wires locally bend outwardly temporarily to accommodate the whole motion. We may now put together a large omnidirectional complex of the sets of four-axis and eight vertex-interconnected transparent plastic triangles with alternate sets of red transparent and uncolored transparent plastic triangles. We can interconnect the triangles from set to set. We then find experimentally that if one force, such as a pencil, is applied to one triangle of one open vector equilibrium, that vector equilibrium closes to become an octahedron, and vice versa, throughout the whole system. Every vector equilibrium will become an octahedron and every octahedron will become a vector equilibrium. (Which is to say that every space becomes a sphere and every sphere becomes a space.)
465.04
Since there is a force distribution lag in the system, it is exactly like dropping a stone into water and getting a planar pattern for a wave, but in this one, we get an omnidirectional wave. We can see the electromagnetic wave pattern as clearly demonstrated by one energy action in the system. This may be the first time man has been provided with omnidirectional conceptual comprehension of the separate and combining transformation events of local electromagnetic-wave-propagation events.
465.05
We must remember that in the local water where we drop the stone, the molecules run inwardly and outwardly toward the center of Earth gravitationally. The water does not move; it accommodates a wave moving through it. A wave inherently goes outward in a pattern without any of the locally accommodating molecules or atoms migrating elsewhere. It is not simultaneous; we are using our memory and afterimage. We make a single energy action at one point and a complete omnidirectional wave occurs. This is similar to the steel-frame cube with all the many triangles rotating in it. (See Sec. 462 et seq.)
465.10
Fig. 465.10 The vector equilibrium with wheels
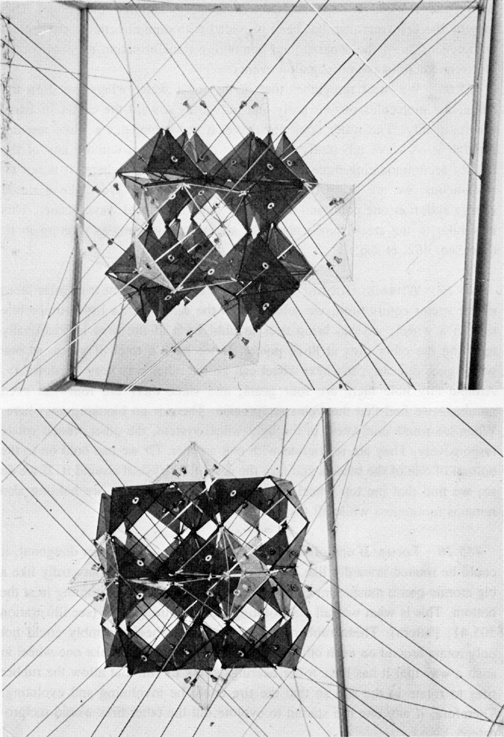
Fig. 465.10 The vector equilibrium with wheels showing that when one wheel is immobilized (the lower wheel in photos) and the system is rotated about the axis shared by the fixed wheel and its opposite wheel, the opposite wheel remains stationary but the other six wheels rotate in concert. The polarity of the system is thus demonstrated.
Link to original
Wheels: Rubber Tires: If, instead of the eight triangular faces of the vector equilibrium, we substitute on the same shaft a little automobile tire on a wheel, we can bring tires in until each of the tires is frictionally touching the other tires at three points. If we have a train of gears, as one wheel goes one way, the next wheel can go the other way very comfortably. Around any hole there are four gears, and since there are four—an even number—we find that the trains reciprocate. There is no blocking anywhere. When we rotate one wheel in the light-wheel system, the other wheels rotate responsively. They are in friction with one another. Or we can hold on to the bottom of one of the wheels and turn the rest of the system around it. If we do so, we find that the top wheel polarly opposite the one we are holding also remains motionless while all the other six rotate.
465.20
Torus: If one of the mounted tires were just a rubber doughnut, it could be rotated inwardly like a torus; or it could be rotated outwardly like a big atomic-bomb mushroom cloud, opening in the center and coming in at the bottom. This is what we call an evoluting and involuting torus (see illustration 505.41, Pattern). These rubber tires of the eight-wheel assembly could not only rotate around on each other, but it is quite possible to make one wheel in such a way that it has little roller bearings along its rim that allow the rubber tires to rotate in the rim so that the tire could be involuting and evoluting. Therefore, if any one tire started to evolute, all the other tires would reciprocate.
465.21
If we hold only an axis in our hand, we can rotate the system around it. But as we rotate it around, all the wheels are rolling. As we saw in the pumping vector equilibrium, the opposite triangles never torque in relation to each other. The opposite wheel of the one we are holding does the same. With the bottom wheel stationary on the ground and another wheel immobilized by one holding it, we can rotate the system so that one wheel rolls around the other. But we find that no matter how much we move it equatorially, if we immobilize one wheel in our fingers, the one opposite it becomes immobilized, too. If we not only hold a wheel immobilized while another is turning, but also squeeze and evolute it, all of the wheels will also involute and evolute.
465.22
It is quite possible to make an automobile tire and mount it in such a way that it looks triangular; that is, it will have a very small radius in its corners. I can take the same rubber and stretch it onto a triangular frame and also have the same little roller bearings so that it can involute and evolute. We will have a set of triangular tires that will pump from being the vector equilibrium into being the octahedron and back again. If we were then to immobilize one part of it, i.e., not let it involute and evolute, the rest of the system, due to rotation, would contract to become an octahedron so that it makes all the others reciprocate involuting and evoluting. We are able then to immobilize one axis, and the rest of the system except our opposite pole will both rotate and involute-evolute pulsatively.
465.30
Four-Dimensional Mobility: We are now discovering that in omnimotional Universe, it is possible to make two moving systems that move four-dimensionally, comfortably, the way we see four sets of wheels (eight wheels altogether) moving quite comfortably. But if we fasten one vector equilibrium to another by a pair of wheels— immobilizing one of them and having an axis immobilized—the rest of the system can keep right on rolling around it. By fastening together two parts of the Universe, we do not stop the rest of the four-dimensional motion of Universe. In all other non-four-dimensional mechanical systems we run into a “three-dimensional” blockage: if anything is blocked, then everything is blocked. But in a four-dimensional system, this is not at all the case. We can have two atoms join one another perfectly well and the rest of Universe can go right on in its motion. Nothing is frustrated, although the atoms themselves may do certain polarized things in relation to one another, which begins to explain a lot of the basic experiences.
465.40 Triangular-cammed, In-out-and-around Jitterbug Model (Short Title)
465.41
The four axes of the vector equilibrium provide the four-dimensionally articulatable model of motion freedoms unimpeded by other motions of either contiguous or remote systems of Universe while copermitting the concurrently articulating both omnidirectional wave propagation and gravitationally convergent embracement. We can also call it by the short title: triangular-cammed, in-out-and-around jitterbug model. (See Fig. 465.01.)
465.42
The “opposite” of the engineers’ equal-and-opposite action and reaction is a strictly 180-degree linear conceptioning, conceived on a planar drawing. Macro is not opposite to micro: these are opposed, inward-andoutward, explosive-contractive, intertransformative accommodations such as those displayed by the eight-triangular- cammed, perimeter-tangent, contactdriven, involuting-evoluting, rubber doughnut jitterbug. In such a model macro and micro are not planarly opposed: they are the poles of inwardoutward, omnidirectional, locally vertexing considerations of experience. (See Fig. 465.10.)
466.00 Energy-valve Functioning of Outer Shell of Nuclear Domains
Fig 466.00 Energy-valve Functions of Closest Sphere Packing
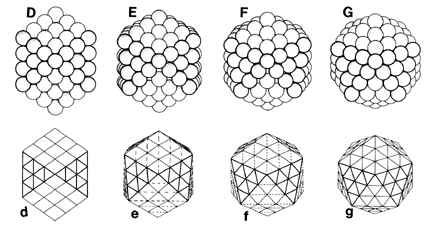
Fig 466.00 Energy-valve Functions of Closest Sphere Packing: This series illustrates the skew- transformation of the 92-ball icosahedral aggregate to a vector equilibrium conformation and its return to the icosahedral state.
Figs. 466A-G illustrate closest-sphere-packing transformation.
Link to original
Figs 466a-g illustrate polyhedral resultants.
466.01
Fig. 466.01 Reciprocal Motion of Nine Internal Spheres Propagates Wave by Diagonal Elongation
Fig. 466.01 Reciprocal Motion of Nine Internal Spheres Propagates Wave by Diagonal Elongation: (The original version of this drawing was copyrighted by R. Buckminster Fuller in 1944.) This is a planar representation of the closest-packed spheres in the outer layer as they skew-transform between the icosahedral and the vector equilibrium phases.
Link to original
A. Apex sphere K surrounded by two 16-ball grids M and N, and by short-axis diamond E and long-axis diamond D.
B. The 90-degree alignment of the 16 balls of any one of the six square faces of the vector equilibrium.
C. Plan view of the closest-packing aspects of any one of the vector equilibrium’s four pairs of nuclear tetrahedra as they begin to torque in the jitterbug process.
D. Short-axis diamond.
E. Long-axis diamond.
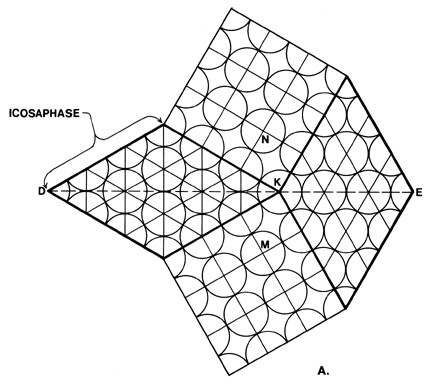
An earlier version of Fig. 466.01 was first published by the author in 1944: it illustrates the energy-valving aspects of the closest-packed spheres interfunctionings as they occur within the three-frequency, 92-ball outer layer of the vector equilibrium as it “jitterbuggingly” skew-transforms into the icosahedral state, then returns to the vector equilibrium state, passes through, and again transforms to the alternately skewed icosahedral state— repeat and repeat.
466.02
The 90-degree interalignment of the 16 balls of any one of the six square faces of the vector equilibrium (Fig. B) is inherently unstable. The 16 balls resolve their instability by forming any one of two alternate types of most closely packed diamonds (Figs. D and E) with either a short cross axis or a long diagonal axis. Both types are equiedged, equiarea, and most densely packed, and they occupy less area than their equiedged square counterparts. This is quickly evidenced geometrically because both the square (Fig. B) and the diamond (Fig. D) have the same-length base edge XY, but the altitude WZ of the square is greater than the altitude Z of the diamond.
466.03
As displayed in a planar array, Fig. A, there is an apex sphere K surroundingly shared by the innermost corners (vertexes) of two square-faced, 16-ball grids, M and N, as well as by the two diamondsÑthe short-axis diamond E and the long- axis diamond D.
466.04
The apex sphere K’s neighboring spheres are uncomfortable because K is surrounded by seven spheres and not six. Only six can closest pack around one in any given plane. One of the two adjacent spheres M or N from the two square-faced grids will get pushed in, and the other one will be pushed out, depending upon which way the vector-equilibrium-to-icosahedron jitterbug transformation is rotating around apex sphere K. The “in-and-out” pumping of spheres M and N acts as an energy-propagating valve.
466.05
Fig. C is a plan view of the closest-sphere-packing manifestation of any one of the vector equilibrium’s four pairs of nuclear tetrahedra as they commence to torque in the jitterbug process. An isometric sketch of this net 39-ball aggregation is given at Fig. 466.31 Note that this torqued pair of nuclear tetrahedra employs three of the vector equilibrium’s six axes. The two unengaged axes of the equator are starved and inoperative.
466.10 High-frequency Sphericity Approaches Flatness
466.11
Where we have six balls in a planar array closest packed around one nucleus, we produce six top and six bottom concave tetrahedral valleys surrounding the nucleus ball. We will call the top set of valleys the northern set and the bottom set the southern set. Despite there being six northern valleys we find that we can nest only three close- packed (triangulated) balls in the valleys. This is because we find that the balls nesting on top of the valleys occupy twice as much planar area as that afforded by the six tetrahedral valleys. Three balls can rest together on the top in omni-close-packed tangency with one another and with the seven balls below them; and three balls can similarly rest omniintertangentially in the bottom valleys as their top and bottom points of tangency bridge exactly across the unoccupied valleys, allowing room for no other spheres. This produces the symmetrical nuclear vector equilibrium of 12 closest-packed spheres around one. (See Fig. 466.13A.)
466.12
The three balls on the top can be lifted as a triangular group and rotated 60 degrees in a plane parallel to the seven balls of the hexagonal equatorial set below them; this triangular group can be then set into the three previously vacant and bridged-over valleys. As this occurs, we have the same 12 spheres closest packed around one with an overall arrangement with the two triangular sets of three on the top, three on the bottom, and six around the equator. The top and the bottom triangular sets act as poles of the system, which— as with all systems— has inherent free spinnability. In both of the two alternate valley occupations the northern polar triangle is surrounded alternately by three squares and three triangles, reading alternately— triangle, square, triangle, square, triangle, square. (See Fig. 466.13B.)
466.13
Fig. 466.13
A. Twelve Closest-packed Spheres around One: Symmetrical nuclear vector equilibrium.
Link to original
B. Twelve Closest-packed Spheres around One: Rotation of top triangular group.
C. Twelve Closest-packed Spheres around One: Alternate nestability in polar triangular valley.
D. Twelve Closest-packed Spheres around One: Alternate polarized symmetry of vector equilibrium.
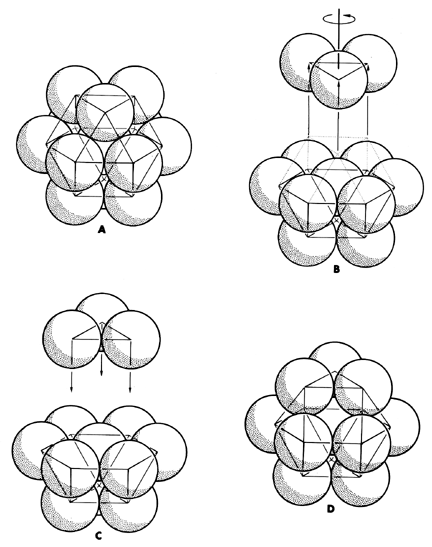
In one polar triangular valley occupation the squares of the northern hemisphere will be adjacent to the triangles of the southern hemisphere. This is the vector- equilibrium condition. In the alternate valley nesting position at the equator the equatorial edges of the squares of the northern hemisphere will abut the squares of the southern hemisphere, and the triangles of the northern hemisphere will abut those of the southern, producing a polarized symmetry condition. In the vector-equilibrium condition we have always and everywhere the triangle-and-square abutments, which produces a four- dimensional symmetry system. (See Sec. 442 and Fig. 466.13C.)
466.14
There is then a duality of conditions of the same 12 nucleus-surrounding first omni-inter-closest-packed layer: we have both a polarized symmetry phase and an equilibrious symmetry phase. Under these alternate conditions we have one of those opportunities of physical Universe to develop a pulsative alternation of interpatterning realizations, whereby the alternations in its equilibrium phase do not activate energy, while its polarized phase does activate energetic proclivities. The equilibrious phase has no associative proclivities, while the polarized phase has associative proclivities. In the polarized phase we have repulsion at one end and attraction at the other: potential switchings on and off of energetic physical Universe. (See Figure 466.13D.)
466.15
When modular frequency enters into the alternately vector equilibrium«polarized conformations, the vertexes of the multifrequenced nuclear system are occupied by uniradius spheres, whereat it is evidenced that the equatorial continuity set of spheres can be claimed either by the northern or southern set of triangles and squares, but they cannot serve both simultaneously. Here again we have alternating conditions— starving or fulfilling— of northern and southern hemispheres matching or nonmatching triangles and squares, with the central equilibrium condition having a large plurality of alternately realizable behaviors under variously modified conditions affected further as frequency increases the numbers of edge-vertex-occupying spheres.
466.16
As the frequencies of vector equilibria or icosahedra increase, the relative size of the occupied arcs of the great circles involved become of ever lesser magnitude. At a high frequency of larger spheres— for example, planet Earth— the conditions of patterning around the 12 external vertexes of the vector equilibria or icosahedra appear to be approximately flat, in contrast to the sharp concavity/convexity of the nonfrequenced convergence of the four planes around the corners of the vector equilibrium and the convergence of the five planes around the corners of the icosahedron.
466.17
In very-high-frequency nuclear systems the approach to flatness from the four planes to five planes tends to induce a 360-degreeness of the sums of the angles around the critical 12 vertexes— in contrast to the 300degree condition existing in both the unfrequenced vector equilibrium and icosahedron. That is what Fig. 466.01 is all about.
466.18
In Figs. 466.01 and 466.41 there is introduced an additional 60 degree equilateral triangle, in surroundment of every directly-nuclear-emanating vertex K. The 12 vector-equilibrium K vertexes are always in direct linear relationship with the system nucleus (see Sec. 414). The additional degrees of angle produced by the high-frequency local flattening around K vertexes introduces a disturbance-full exterior shell condition that occasions energetic consequences of a centrifugal character.
466.20 Centrifugal Forces
466.21
As we get into ultra-ultra-high-frequency, and as we get to greater and greater sphericity, by virtue of the inherent spin, we can account for the vector equilibrium becoming the sphere of lesser radius, becoming the sphere of approximately tetravolume 5, while the relative flatness around the critical K vertexes relates to the centrifugal forces involved.
466.22
People think of centrifugal force as picturable by arrows expelled radially (perpendicularly) outward. But in fact centrifugal force operates as a hammer-thrower’s hammer does: it departs from the system tangentially, not radially. Since the outward tangent ends reach ever farther away, there is a net only-indirectly-radial force realized. This common misapprehension of the assumed 180-degreeness of centrifugal forces has greatly misled human thinking and has obscured comprehensions of precession.
466.23
At certain high frequencies the energy displacements tend to occur that do not tend to occur at low- or no-frequency conditions, which brings us into the realm of possibly comprehending the photon-emitting radiation limits of operation within the 92 regenerative chemical elements and the split-second articulatability of transuranium nuclear systems when bombarded with ultraultra-high-frequency energy missiles. The lower the frequency, the higher the required bombardment energies.
466.30 Nuclear Tetrahedra Pairs: Closest-sphere-packing Functions
466.31
Fig. 466.31 Nuclear Tetrahedra Pairs
Fig. 466.31 Nuclear Tetrahedra Pairs: An isometric view of 39-ball aggregate of torqued, north-south pole, axial pair of tetrahedra at nucleus of vector equilibrium.
Link to original
In Fig. 466.01-C is a plan view of the closest-sphere-packing manifestation of any one of the vector equilibrium’s four pairs of nuclear tetrahedra as they commence to torque in the jitterbug process. An isometric sketch of this net 39-ball aggregation is given in Fig. 466.31. Note that this torqued, north-south-pole, axial pair of tetrahedra employs three of the vector equilibrium’s six axes. The other three unengaged axes lying in the equator are starved and inoperative— angularly acceleratable independently of the north-south axial motion.
466.32
In Fig. 466.01-C we see the internal picture from the nucleus to the vertexes displaying the hexagonal pattern emerging at F³.
466.33
There can be only one pair of tetrahedra operative at any one time. The other three pairs of tetrahedra function as standby auxiliaries, as in the triangular-cammed, in- out-and-around, rubber cam model described in Secs. 465.01 and 465.10.
466.34
The active triangular face has to share its vertexes with those of the adjacent square-face grids. This transformation relates to the transformation of the octahedron and the rhombic dodecahedron.
466.35
In the outer layer of 92 balls— two of which are extracted for the axis of spin—there are eight triangular faces. There are four balls in the center of each of the six square faces.
6 × 4 = 24. 92 - 24 = 68. 68/8 = 8 l/2.
We need 20 balls for a pair of complete polar triangles.
68 - 20 = 48. 48/8 = 6; a pair of 6s = 12.
Thus there are only 12 available where 20 are required for a polar pair. In any one hemisphere the vertex balls A, B, C used by a polar triangle make it impossible to form any additional polar units.
466.40 Universal Section of Compound Molecular Matrix
466.41
The illustration at the back-end paper was first published by the author in 1944. It displays the surface shell matrix of an ultra-high-frequency sphere in which a local planar flatness is approached. The vertexes are energy centers, just as in the isotropic vector matrix where 12 exterior corner vertexes of the vector equilibria are always connected in 180-degree tangential direct radial alignment with the nuclear sphere.
466.42
This compound molecular matrix grid provides a model for molecular compounding because it accommodates more than one tetrahedron.
466.43
This matrix is not isotropic. It is anisotropic. It accommodates the domain of a nucleus.