400.011
A system is the first subdivision of Universe. It divides all the Universe into six parts: first, all the universal events occurring geometrically outside the system; second, all the universal events occurring geometrically inside the system; third, all the universal events occurring nonsimultaneously, remotely, and unrelatedly prior to the system events; fourth, the Universe events occurring nonsimultaneously, remotely, and unrelatedly subsequent to the system events; fifth, all the geometrically arrayed set of events constituting the system itself; and sixth, all the Universe events occurring synchronously and or coincidentally to and with the systematic set of events uniquely considered.
400.02
A system is the first subdivision of Universe into a conceivable entity separating all that is nonsimultaneously and geometrically outside the system, ergo irrelevant, from all that is nonsimultaneously and geometrically inside and irrelevant to the system; it is the remainder of Universe that conceptually constitutes the system’s set of conceptually tunable and geometrical interrelatability of events.
400.03
Conceptual tuning means occurring within the optical “rainbow” range of human’s sensing within the electromagnetic spectrum and wherein the geometrical relationships are imaginatively conceivable by humans independently of size and are identifiable systematically by their agreement with the angular configurations and topological characteristics of polyhedra or polyhedral complexes.
400.04
All systems are polyhedra. Systems having insideness and outsideness must return upon themselves in a plurality of directions and are therefore interiorally concave and exteriorally convex. Because concaveness reflectively concentrates radiation impinging upon it and convexity diffuses radiation impinging upon it, concavity and convexity are fundamentally different, and therefore every system has an always and only coexisting inward and outward functionally differentialed complementarity. Any one system has only one insideness and only one outsideness.
400.05
In addition to possessing inherent insideness and outsideness, a system is inherently concave and convex, complex, and finite. A system may be either symmetrical or asymmetrical. A system may consist of a plurality of subsystems. Oneness, twoness, and threeness cannot constitute a system, as they inherently lack insideness and outsideness. Twoness constitutes wavilinear relatedness. Threeness constitutes planar relatedness, which is inherently triangular. Three triangular planes alone cannot differentiate, distinguish, or constitute a system. At minimum, it takes four triangular planes having inherent fourness of vertexes to constitute differential withinness and withoutness. Fourness of geometrically contiguous and synchronous event foci and their coincidentally defined four triangular planes, along with their six common edges provided by the six wavilinear vectors connecting the four event foci, altogether inherently differentiate, distinguish, initially institute, and constitute prime or minimum withinness and withoutness.
400.06
Thought is systemic. Cerebration and intellection are initiated by differential discernment of relevance from nonrelevance in respect to an intuitively focused-upon complex of events which also intuitively suggests inherent and potentially significant system interrelatedness.
400.07
Human thoughts are always conceptually and definitively confined to system considerability and comprehension. The whole Universe may not be conceptually considered by thought because thinkability is limited to contiguous and contemporary integrity of conformation of consideration, and Universe consists of a vast inventory of nonsynchronous, noncontiguous, noncontemporary, noncoexisting, irreversibly transforming, dissimilar events.
400.08
Unit means system integrity. Organic means regenerative system integrity. As minimum or prime systems consist of four event foci and their always and only coexisting fourness of triangularly defined planar facets, along with their sixness of a wavilinearly defined minimum set of unique componentation relatedness, unity is inherently plural. Unity is plural. A system is a local phenomenon in the Universe. Each of the conceivable or imaginable awareness or thinkability entities or phenomena inducing or producing onenesses or twonesses are subvisible and potentially further subdivisible, or as yet unresolved, ergo unrecognized systems. Functions always and only cooccur as subsystem relativistics, characteristics, inherencies, and proclivities. Functions occur only as parts of systems. Universe is constituted of a complex plurality of nonsimultaneous and only partially overlappingly occurring systems, not one system.
400.09
All the interrelationships of system foci are conceptually representable by vectors (see Sec. 521). A system is a closed configuration of vectors. It is a pattern of forces constituting a geometrical integrity that returns upon itself in a plurality of directions. Polyhedral systems display a plurality of polygonal perimeters, all of which eventually return upon themselves. Systems have an electable plurality of view-induced polarities. The polygons of polyhedra peregrinate systematically and sometimes wavilinearly around three or more noncongruent axes.
400.10
Absolutely straight lines or absolutely flat planes would, theoretically, continue onwardly or spread areally outward to infinity. The difference between infinity and finity is governed by the taking out of angular sinuses, like pieces of pie cut out of surface areas around a point in an otherwise absolute and infinitely extendable plane, and joining together the open gap’s radial edges. This is the way lampshades and skirts are made. Joining the sinused fan-edges together makes a cone. If two cones are made and their respective open circle edges are brought together, a finite or closed system results. It has two poles and two polar domains. The two poles and their polar cone surface domains, as well as the defined insideness and outsideness, are inherent and primary characteristics of all systems.
400.11
All systems are continually importing as well as exporting energy. Physics has found only myriad pattern integrities of comprehensively nonsimultaneous and only partially overlapping evolution; of disintegrative “heres” and reintegrative “theres,” which are omnilocal vari-intertransformabilities of limited duration identities of an apparently eternal, physical Universe regenerating mathematically treatable energy quanta.
400.20
Comprehensibility of Systems: All systems are subject to comprehension, and their mathematical integrity of topological characteristics and trigonometric interfunctioning can be coped with by systematic logic.
400.21
A system is the antithesis of a nonsystem. A nonsystem lacks omnidirectional definition. Nonsystems such as theoretical planes or straight lines cannot be found experimentally. We are scientifically bound to experientially discovered and experimentally demonstrable systems thinking.
400.22
General systems theory treats with phenomena that are holistically comprehensible. The objects of our experience are finite systems. Their superficial outlines close back upon themselves multidirectionally as a systematic continuity of relevantly contiguous events.
400.23
Maximum system complexity consists of a dissimilarly quantified inventory of unique and nonintersubstitutable components. That is, Euler’s irreducible-system aspects of vertexes, areas, and edges exhibit the respective dissimilar quantities 4, 4, and 6 in the minimum prime system, the tetrahedron. This demonstrates the inherent synergy of all systems, since their minimum overall inventory of inherent characteristics is unpredicted and unpredictable by any of the parts taken separately. Systems are unpredicted by oneness, twoness, or threeness. This explains how it happens that general systems theory is a new branch of science. (See Sec. 537.30.)
400.24
General systems theory is another example of evolution by inadvertence. It developed fortuitously to accommodate the unprecedented and vastly complex undertakings of the late twentieth century, such as the 10 million separate and only partially overlapping “critical path” tasks that had to be accomplished and tested to foolproof reliability en route to countdown to eventual blastoff, Moon landing, and safe return to Earth, which found all conventional mathematical theory wanting. It required the development of the computer and star-focused instruments and computer programming arts together with operational research, which guess-improvises the inventory of parameter of variables that must be progressively programmed into the system in order further to reduce the magnitude of tolerated errors consequent to trial “bird” (rocket vehicle) “flight” (trajectory) control as the vehicles are progressively zeroed-in to progressive target rendezvous with celestial entities. Neither differential and integral calculus, nor “probability” statistics, nor any branch of specialized hard science has accredited synergy as an a priori assumption. General systems theory, which recognizes synergy as inherent, was discovered and named by the biologically inspired Ludwig von Bertalanffy.
400.25
Every system, as a subdivision of the total experience of Universe, must accommodate traffic of inbound and outbound events and inward-outward relationships with other systems’ aspects of Universe. Effective thinking is systematic because intellectual comprehension occurs only when the interpatternings of experience events’ star foci interrelationships return upon themselves. Then the case history becomes “closed.” A system is a patterning of enclosure consisting of a conceptual aggregate of recalled experience items, or events, having inherent insideness, outsideness, and omniaroundness.
400.26 Systems are aggregates of four or more critically contiguous relevant events having neither solidity nor surface or linear continuity. Events are systemic.
400.30
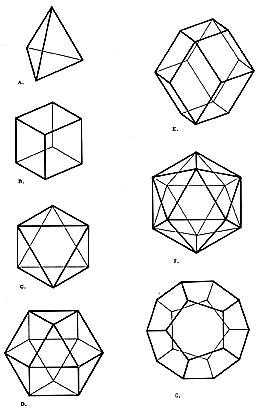
Fig. 400.30 Topological relationships of faces, vertexes, and edges of various polyhedra
Fig. 400.30 Topological relationships of faces, vertexes, and edges of various polyhedra:
Link to original
A. Tetrahedron: 4 faces, 4 vertexes, 6 edges.
B. Cube: 6 faces, 8 vertexes, 12 edges.
C. Octahedron: 8 faces, 6 vertexes, 12 edges.
D. Vector Equilibrium (cuboctahedron): 14 faces, 12 vertexes, 24 edges.
E. Rhombic dodecahedron: 12 faces, 14 vertexes, 24 edges.
F. Icosahedron: 20 faces, 12 vertexes 30 edges.
G. Pentagonal dodecahedron: 12 faces, 20 vertexes, 30 edges.
Euler’s topological formula is f + (v - 2) = e, or f + v = e + 2. In any system, two vertexes may be considered polarized. These vertexes are then subtracted to balance the equation. This suggests the inherent twoness of Universe.
Tiger’s Skin: Typical of all finitely conceptual objects, or systems, the tiger’s skin can be locally pierced and thence slotted open. Thereafter, by elongating the slot and initiating new subslots therefrom in various directions, the skin gradually can be peeled open and removed all in one piece. Adequate opening of the slots into angular sinuses will permit the skin to lie out progressively flat. Thus, the original lunar gash from the first puncture develops into many subgashes leading from the original gash into any remaining domical areas of the skin. The slitting of a paper cone from its circular edge to its apex allows the paper to be laid out as a flat “fan” intruded by an angular sinus. A sinus is the part of an angle that is not the angle’s diverging sides. Sinus means in Latin a “withoutness” — an opening out — a definitively introduced “nothingness.”
400.31
The surface contour of any object or system — be it the skin of a complex creature such as a crocodile, or the skin of a simple prune, or a sugar-cube wrapping, or a dodecahedron, or any formal angular polyhedra — can thus be “skinned” and laid out flat.
400.40
Finiteness of Systems: Definition: Single systems occurring initially and minimally as four synchronously related event foci — ergo, inherently as tetrahedra, regular or irregular — are omnitriangulated and may be either symmetrical or asymmetrical. In single symmetrical systems, all the vertexes are equidistant radially from their common volumetric centers, and the centers of area of all their triangular facets are also equidistant from the system’s common volumetric center.
400.41
The minimum single symmetrical system is the regular tetrahedron, which contains the least volume with the most surface as compared to all other symmetrical single systems. There are only three single symmetrical systems: the regular tetrahedron, with a “unit” volume-to-skin ratio of 1 to l; the regular octahedron, with a volume-to- surface ratio of 2 to 1; and the regular icosahedron, with a volume-to-surface ratio of 3.7 to 1. Single asymmetrical systems contain less volume per surface area of containment than do symmetrical or regular tetrahedra. The more asymmetrical, the less the volume-to- surface ratio. Since the structural strength is expressed by the vector edges, the more asymmetrical, the greater is the containment strength per unit of volumetric content.
400.42
Since the minimum system consists of two types of tetrahedra, one symmetrical (or regular) and the other asymmetrical (or irregular); and since also the asymmetrical have greater enveloping strength per units of contained event phenomena, we will differentiate the two minimum-system types by speaking of the simplest, or minimum, single symmetrical system as the mini-symmetric system; and we will refer to the minimum asymmetric system as the mini-asymmetric system. And since the mini- symmetric system is the regular tetrahedron, which cannot be compounded face-to-face with other unit-edged symmetric tetrahedra to fill allspace, but, in order to fill allspace, must be compounded with the tetrahedron’s complementary symmetrical system, the octahedron, which is not a minimum system and has twice the volume-to-surface ratio of the tetrahedron of equal edge vector dimension; and since, on the other hand, two special- case minimum asymmetric tetrahedra, the A Quanta Modules and the B Quanta Modules (see Sec. 920.00), have equal volume and may be face-compounded with one another to fill allspace, and are uniquely the highest common volumetric multiple of allspace-filling; and since the single asymmetrical tetrahedron formed by compounding two symmetrical tetrahedral A Modules and one asymmetrical tetrahedral B Module will compound with multiples of itself to fill all positive space, and may be turned inside out to form its noncongruent negative complement (which may also be compounded with multiples of itself to fill all negative space), this three-module, minimum asymmetric (irregular) tetrahedral system, which accommodates both positive or negative space and whose volume is exactly 1/8 that of the regular tetrahedron; and exactly 1/32 the volume of the regular octahedron; and exactly 1/160 the volume of the regular vector equilibrium of zero frequency; and exactly 1/1280 the volume of the vector equilibrium of the initial of all frequencies, the integer 2, which is to say that, expressed in the omnirational terms of the highest common multiple allspace-filling geometry’s A or B Modules, the minimum realizable nuclear equilibrium of closest-packing symmetry of unit radius spheres packed around one sphere — which is the vector equilibrium (see Sec. 413.00) — consists of 1,280 A or B Modules, and 1,280 = 2⁸× 5.
400.43
Since the two-A-Module, one-B-Module minimum asymmetric system tetrahedron constitutes the generalized nuclear geometrical limit of rational differentiation, it is most suitably to be identified as the prime minimum rational structural system: also known as the MITE (see “Modelability,” Sec. 950.00). The MITE is the mathematically demonstrable microlimit of rational fractionation of both physically energetic structuring and metaphysical structuring as a single, universal, geometrically discrete system-constant of quantation. The MITE consists of two A Modules and one B Module, which are mathematically demonstrable as the minimum cosmic volume constant, but not the geometrical shape constant. The shape differentiability renders the volume-to-surface ratio of the B Modules more envelopingly powerful than the volume-to-surface ratio of the A Modules; ergo, the most powerful local-energy-impounding, omnirationally quantatable, microcosmic structural system.
400.44
The MITE may be turned inside out by having each of its two A Modules and one B Module turn themselves inside out and recombine to fill all negative space. It is also to be observed that one all-negative-space-filling and one all-positive-space-filling MITE may be face-associated structurally to produce yet another single minimum system asymmetric tetrahedral, all-positive-and-negative space filler whose modular volumetric unity value of six corresponds with the sixness of vectorial edges of the minimum system’s tetrahedral four foci event relationships.
400.45
It is characteristic of a single prime system that the aggregate of angles convergent around its vertexes must be concave or convex with respect to the position from which they are viewed — concave if viewed from the inside, convex when viewed from outside.
400.46
There are in all systems the additive twoness of the poles and the multiplicative twoness of the coexistent concavity and convexity of the system’s insideness and outsideness.
400.47
Planet Earth is a system. You are a system. The “surface,” or minimally enclosing envelopmental relationship, of any system such as the Earth is finite.
400.50
Other Characteristics of Systems: Prime Rational Integer Characteristics: Electromagnetic frequencies of systems are sometimes complex but always exist in complementation of gravitational forces to constitute the prime rational integer characteristics of physical systems.
400.51
Systems may be symmetrical or asymmetrical.
400.52
Systems are domains of volumes. Systems can have nuclei, and prime volumes cannot.
400.53
Interconnection of Systems: If two adjacent systems become joined by one vertex, they still constitute two systems, but universally interjointed. If two adjacent systems are interconnected by two vertexes, they remain two systems, interlocked by a hinge. If two adjacent systems become adjoined by three vertexes, they become one complex system because they have acquired unit insideness and outsideness.
400.54
If two adjacent systems are interpositioned with their respective centers of volume congruent and all their respective vertexes equidistant from their common center of volumes, they become one system. If their respective vertexes are at different distances radially from their common center of volumes, they become one complex system. If the complex system’s respective interpositioned systems are all symmetric, then they become one complex symmetric system.
400.55
Polyhedra: Polyhedra consist only of polyhedra. Polyhedra are always pro tem constellations of polyhedra. Polyhedra are defined only by polyhedra and only by a minimum of four polyhedra.
400.56
All systems are polyhedra: All polyhedra are systems.
400.57
The observed or tuned-in polyhedra whose plurality of corners, faces, and edges and frequency of subdividing are tunably discernible to the tuning-in station (the observer) consist of corners that are infra-threshold-tunable polyhedra and whose faces or openings are ultra-threshold tunables.
400.60
Motion of Systems: Systems can spin. There is at least one axis of rotation of any system.
400.61
Systems can orbit. Systems can contract and expand. They can torque; they can turn inside out; and they can interprecess their parts.
400.62
Systems are, in effect, spherical gears. Their internal-external pulsating and rotating “teeth” consist in reality of both circumferential and radial waves of various frequencies of subdivision of spherical unity. They often fail to mesh with other local systems. Some of them mesh only in special aspects. The universally frequent nonmeshing of geometrical sizes and rates of wavelengths and frequencies produces an omnicondition in which the new system’s center, as each is created, must continually occupy an omnidirectionally greater domain.
400.65 Summary: Six Positive and Negative Motions
400.651
Energetic Functions: Twoness is synergetic. The twoness of inherent otherness of awareness is synergetic. Twoness inherently induces the dynamic quality of oscillatory propagation unpredicted by one-integer-plus-one-integer as empty set. Synergetic twoness and the primitive topological complexity of minimum systems themselves and the presently-non-tuned-in but always inherently coexisting macro-micro otherness inherently produces the ever-interaccommodative, intertransforming, ceaseless restlessness, an intercomplementary characteristic inherent in energetic functions.
400.652
Resultants of pluralities of copotentials of initial freedoms of unique, reciprocally displacing event patterning, of necessity, occasion fundamental conversion of Euler’s empty integer plus twoness into the synergetic — or unpredicted — inherent nuclear cohesion.
400.653
Structural Functions: Structural functions are summarized at Sec. 610.10. (Compare also Sec. 502.05.)
400.654
Summary: There are six basic motions in Universe. All of them are positive and negative: active and passive. The first five are individually experienceable and popularly familiar; the last — precession — is less popularly familiar:
- Spin: Spinning is horizontal or vertical axial rotation. Spinnability has to be totally independent of the system’s local surface transformations.
- Orbit: No path of travel may be 180-degree linear in a multibodied, gravity-cohered, omnimotional Universe. The initial reality of all travel is orbital as a composite resultant of all tensive restraints. As the Sun’s pull on the Earth produces orbiting, orbiting electrons produce directional field pulls. As 99.99 percent of the bodies in motion in physical Universe are operating orbitally, orbiting must be thought of as normal. (Spinning and orbiting together is dancing.) Orbits are regenerative feedback circuits.
- Inside-out: Anything with a hole in it turns inside-out. The tetrahedron turns inside- out through any of its four space-window faces. Kissing humans turn partially inside- out as they “pucker” their lips.
- Expansion-contraction: Expansion is radiant divergence, and contraction is gravitational convergence.
- Torque: Torque and countertorque are local twists in which one pole spins right and the other pole spins left.
- Precession: Precession is the effect of bodies in motion on other bodies in motion in interrelationship patterns of other than 180 degrees. Reactions and resultants are precessional, bringing about orbits and not straight lines. For instance, the effect of the Sun traveling around our galaxy center at 700,000 miles per hour upon the Earth cotraveling with the Sun; the precessional effect of gravity between the two is an effect at 90 degrees to the Sun pull, which makes the Earth both spin and orbit around the Sun.
400.66 Basic Motions and Degrees of Freedom
400.661
There are six positive and six negative exercises of the motion freedoms (see Sec. 400.654), but the freedoms themselves come from the fact that the minimum structural system in Universe consists of six vectors: the tetrahedron. The tetrahedron has a minimum of six edges.
400.662
The tetrahedron is a fourfold symmetry: As the minimum something it has four faces of symmetry and four vertexes of symmetry and six edge vectors providing the minimum degrees of freedom. Any one face has three edges, and the total of six edge vectors in the structure defines the set of events. With every turn to play in Universe we always get six moves: So the minimum something is the minimum play. (Compare Sec. 537.10, Fig. 608.01, and Sec. 825.27.)
400.663
The minimum six vectors can be interarrayed at all kinds of angles provided they all add to 720 degrees — the variable interangling provides the degrees of freedom. We find in topology that all minimum systems have vertexes, faces, and edges and that the number of edges in Universe is always evenly divisible by six. These are the six active and passive degrees of freedom, and they are always there. They do not operate in a plane; they are omnidirectionally interarranged.
400.664
The six basic motions are complex consequences of the six degrees of freedom. If you want to have an instrument held in position in respect to any cosmic body such as Earth, it will take exactly six restraints: no more, no less. If we have only five restraints, then the tetrahedron will change its shape. Shape requires six restraints. Exactly six systemic interrestraints produce structure. Six restraints are essential to structure and to pattern stability.
400.665
Anything that holds its shape has a minimum of six positive and negative integral restraints so that the system itself can spin or the system itself can orbit. The system itself can inside-out. These are system behaviors, and the six degrees of restraint are integral.
400.666
The six basic integral system cosmic motions have six internal structure- producing restraints and six external unique motion-producing restraints. (If a system is frozen as part of a larger system, it will have to lose one of its restraints.) Internally and externally there are 12 alternate optimally equieconomical degrees of cosmic freedom, all of which must be coped with to produce cosmic order.
400.70 Visibility and Invisibility of Systems
400.71
There are six uniquely differentiable components of all systems and of all thoughts: (1) insideness; (2) outsideness; and (3) (4) (5) (6) the four star events (see Sec. 510) that do the systemic defining of the insideness and the outsideness, which inadvertently display:
— six interrelationships, which in turn inadvertently define:
— four triangle windows, which, again inadvertently, reveal the untuned-in programs potentially occurring between the six most economical omniinterrelationships whose triangular edge-defining lines inadvertently exclude the macro-outsideness and definingly include the microinsideness.
400.72
Therefore there are six parts of Universe: four of them are always humanly conceptualizable and always define the successively considerable domains of human thought, while the other two of the six cosmic parts are always untuned-in, ergo invisible; i.e., the ultramacrotunable otherness and the inframicrotunable otherness.
400.73
The visibility of conceptuality is always so preoccupying of human senses and minds as to render spontaneously forgettable our only-progressively-acquired knowledge of the vast ranges of the known-to-exist but nonsimultaneously tunable — ergo, invisible — otherness of Scenario Universe.
401.00 Twelve Vectors of Restraint, Six Positive and Six Negative, Define Minimum System
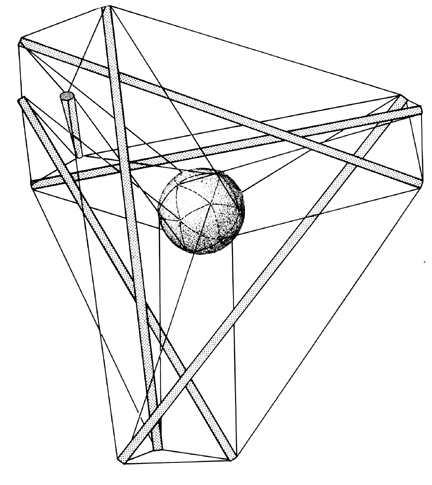
Fig. 401.00 Tensegrity Tetrahedron with 'Me' Ball Suspended at Center of Volume of the Tetrahedron
Fig. 401.00 Tensegrity Tetrahedron with “Me” Ball Suspended at Center of Volume of the Tetrahedron: Note that the six solid compression members are the acceleration vectors trying to escape from Universe at either end, by action and reaction; whereas the ends of each would-be escapee are restrained by three tensors, one long and two short; while the ball at the center is restrained from local torque and twist by three triangulated tensors tangentially affixed from each of the four corners.
Link to original
401.01
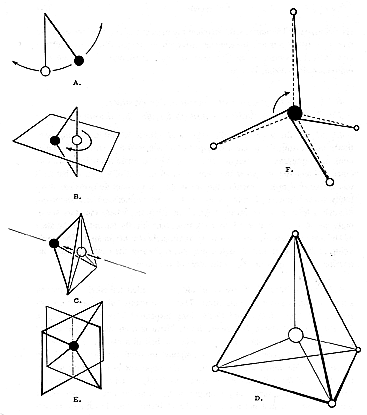
Fig. 401.01 Four Vectors of Restraint Define Minimum System
Fig. 401.01 Four Vectors of Restraint Define Minimum System:
Investigation of the requirements for a minimum system.A. One vector of restraint allows ball to define complete sphere__ a three-dimensional system.
Link to original
B. Two vectors: a plane__ a two-dimensional system.
C. Three vectors: a line__ a one-dimensional system.
D. Four vectors: a point__ no displacement.
E. Note the possibility of turbining with the position otherwise fixed by the four vectors of restraint.
F. The four vectors define the tetrahedron: the first identifiable “system” __ a primary or minimum subdivision of Universe. The ball lies at the center of gravity within the tetrahedron.
At the top of Illus. 401.01 (see also Illus. 401.00 in drawings section), we see something like a ping-pong ball attached to a string. The pingpong ball represents me, and the string is gravity (or mass attraction), with its other end tethered to a point that represents all the rest of Universe that isn’t me. Because of mass attraction, the one thing that I cannot do is escape absolutely from Universe. I may try to exert terrific acceleration and shoot out through a hole in the Galaxies, beyond the Pleiades, where the stars seemingly are so scarce that as I look back from fantastically far out, all the stars of Universe seem to be collected in approximately one bright spot. The single string of the model, long though it may be, represents the combined mass attraction exerted upon me by all the stars of Universe.
401.02
Tetherball: There is an old game called tetherball, played by tennis players lacking a tennis court. There is a tennis ball fastened powerfully to a strong, slender cord 19 feet long suspended from the top of a pole 22 feet in height above the ground level. There is a circular marker on the pole at the 11’ 4” height. The server bats the ball in a clockwise circumferential direction around the pole, attempting to wind its cord completely around the pole above the 11’ 4” mark. The opponent can intercept and attempt to wind the ball counterclockwise. Obviously, a tethered ball on a long string is free to describe any omnigeometric forms of circles, spheres, or giraffes, but it cannot get away from the Universe. This is called one restraint: the fundamental “otherness” essential to initial “awareness” of the observer. (Nothing to observe: no awareness: only nothingness.) Otherness always imposes a minimum of one restraint, weak though it may be, on all awareness, which is the beginning of “Life.”
401.03
But the imagined experience of cosmically long journeys teaches me that the possibility of finding such a hole in the celestial myriadicity to attain such a unified paralactic bunching of all island nebulae is a futile search. Therefore, I resign myself to acknowledgment of at least two a priori restraints that inescapably affect my relative cosmic freedom. Hoping to save myself vast cosmic time, and accepting my present position in Universe, I try to process the known data on the mass dimensions of all the known stars and try to divide them all into two opposite hemispherical teams — those to my right and those to my left. Then assuming all the right-hand hemisphere group’s mass attraction to be accumulatively resolved into one mass-attractive restraint tied to my right arm’s wrist, and all the other cosmic hemisphere’s equal tensions tied to my left arm’s wrist, I find myself used like a middleman in a ropeless tug of war, liable to have my arms pulled out of my armpits. So I tie both the tension lines around my waist. Now I am in the same dynamic situation as a ping-pong ball suspended in the middle of a one-string fiddle. Because all strings, no matter how tautly strung, can still vibrate, I can still move. But I find that with two restraints I can move about in circles, cloverleafs, or figures-of-eight, but always and only in a plane that is perpendicular to the string of which I am in the middle.
401.04
Now I conclude that the various motions of the stars make it illogical to assume any persistence of the two hemispherical star sphere groupings. The star accelerations produce the inertial advantage of awayness to which my mass-attraction tethers were attached. I therefore conclude that it is more probable that such dynamic inertia will persist in three groups. Now I have three restraints, and the ping-pong ball “me” acts as if it were in the middle of a drumhead, or as tensilely suspended at the center of area of a triangle by three strings fastened at the triangle’s corners. The ping-pong ball “me” can still move, but only in a line perpendicular to the plane of the drumhead or web triangle. I am constrained by three converging lines as I oscillate to and fro between the opposite apexes of two dynamically described, base-to-base, positive or negative tetrahedra formed by the resonating drumhead’s terminal oscillations.
401.05
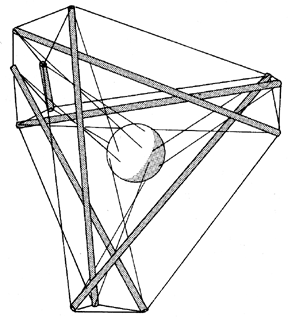
Fig. 401.05
Fig. 401.05 The six compression members are the acceleration vectors trying to escape from Universe at either end by action and reaction, while the ends of each would-be escapee are restrained by three tensors; while the ball at the center is restrained from local torque and twist by three triangulated tensors from each of the four corners tangentially affixed.
Link to original
With only one restraint, the ball was moving omnidirectionally or multidimensionally. With two restraints, it was moving in a plane; with three restraints, it moves only in a line. I now conclude that it is more probable that I can concentrate all the restraints operating upon me from all the stars because of the multidirectional pull of all the stars actually pulling me. I conclude that there is much redundancy but that four restraints is closer to a matter of reality than three restraints. When we attach a fourth restraint perpendicular to the center of the drumhead and pull it only in the “fro” direction, the ping-pong ball “me” seems at last to be immobilized. With four restraints the ping- pong ball “me” can no longer move either toward or away from any other parts of the Universe. But the ball can twist locally, that is, it can rotate in place around an axis, and that axis itself can incline at many angles, as does the gyroscope top, without alteration of its volumetric center position in respect to the four vertexial star groups. Because the vectors are coming together in nonequilateral quadrangles, i.e., in trapeoids, the restraints are not intertriangulated, and we have learned experimentally that only triangles are stable. (See Sec. 610, Triangulation.) Therefore, it is possible for the ball to “turbine,” rotate, and precess locally in place without altering the geometrical position at volume center of the celestial tetrahedron from whose four corners the four vectors of restraint were imposed. The six edges of the celestial spherical tetrahedron represent the three mass-attraction restraints imposed on each of the tetrahedron’s four corner mass centers as each being in normal acceleration is precessionally restrained from exiting from Universe. Each of the four corners’ group massiveness is restrained by all three of the other tetrahedral corner mass centers. Any one of the massmoment acceleration tendencies to part company with the others is overpowered three-to-one by the three others. Thus the cohering integrity of Universe is manifest to us by consideration of the celestial advantage points from which our four central restraints were mounted. Though the ping-pong “me” ball can be twisted and torqued in place, it cannot be moved from its tetrahedral center position. To prevent local in-position twist and torque, each of the four corner tensional restraints will have to be multiplyingly replaced by three restraints, all springing from three external points at each of the four tetrahedral corners; and each of the three tensions from any one of the four corners must cross the others triangularly and be attached tangentially to the ball at the center. These 12 now completely restrain any motion of the central ball in relation to the other four.
401.06
The purpose of our investigation was to find the requirements of a minimum system. Our experimental model demonstrates that it takes four vectors to define a point with the ping-pong ball at the center of gravity and center of volume of the regular tetrahedron. It takes 12 such vectors to both position and locally immobilize. It takes six external push vectors and six external pull vectors to define the minimum nuclear structural system: a primary subdivision of Universe. To summarize, the celestial tetrahedron has six positive and six negative internal vectors and six positive and six negative external vectors.
401.07
Four external “star” foci effecting complete immobilization of the “me” ball are the same four event foci that we learned earlier (Sec. 405.05) always constitute the minimum number of events necessary to define the insideness and outsideness of a system.
401.08
Tetherball: In the “me” ball in Universe 12 structural restraints are necessary to eliminate all the degrees of freedom because all the initial four restraints are connected to the surface of the “me” sphere and not to its center. The four points of tangency describe a square, and they permit local twist and torque because a square is unstable. So each tension has to be replaced by three tension restraints to produce a tensegrity structure within which the “me” ball may be omninonredundantly immobilized.
402.00 Tetrahedron as System
402.01
The tetrahedron as a real system consists of one concave tetrahedron and a second convex tetrahedron, plus a third tetrahedron for all the Universe outside the system-as-tetrahedron, and a fourth tetrahedron complementarily accounting for all Universe inside the system-as-tetrahedron. All the angles are the same on the inside as on the outside.
402.02
A tetrahedron is a triangularly faceted polyhedron of four faces. It is unique as a system, for it is the minimum possible system.
403.00 Stable and Unstable Systems
403.01
There are stable systems and unstable systems. (For a discussion of stable and unstable structures, see Sec. 608, Stability: Necklace.)
403.02
Conceptuality: Unstable systems are conceptual as momentary positional relationships of unstructured-component event aggregates; for example, amongst the stars comprising the Big Dipper — in Ursa Major — the second and third stars in the dipper’s handle are, respectively, 100- and 200-light-years away from Earth and, though seemingly to us in the same plane, are not all so; and they are both moving in opposite directions and so in due course they will no longer seem to be in the same constellation. In the same way, four airplanes flying in different directions may be within visible range of one another, but are far too remote for mass inter-attraction to become critical and pull them into one another. Stable systems are conceptual as structured, which means componently omni- mtertriangulated critical-proximity, interrelevant, coordinate, constellar event aggregates.
403.03
Generalized Principles: If the only momentary and optically illusory system consideration proves to be unstable, it does not manifest generalized principle. If systems are stable, they are inherent in and accommodate all generalized principles.